
死んだクモのロボットがホラー映画(またはあなたの最悪の悪夢)からまっすぐなものだと思うなら、私はあなたにいくつかのニュースがあります。
ライス大学の機械エンジニアは、実際にクモの死体を「ネクロボット」と呼ばれるものに変え、機械的なグリッパーとして機能させることができました。
「ネクロボティクス」とは何ですか?
動物の特性やコンポーネントを使用してロボットシステムを作成することは、研究において目新しいことではありません。
ご挨拶、ヒューマノイド
今すぐニュースレターを購読して、受信トレイにあるお気に入りのAIストーリーを毎週まとめてください。
のことを考える バイオインスパイアード と バイオハイブリッド ロボット。

生物に着想を得たアプローチでは、研究者は動物の物理的形態を調べて設計のアイデアを探し、それらを複雑な工学的システムに実装します。 バイオハイブリッドシステムでは、生きているまたは能動的な生物学的材料がシステムの基礎として機能し、注意深く正確なメンテナンスが必要です。
ライス大学のチームは、死んだクモを機械的なグリッパーとして転用することで、科学をさらに一歩進めました。 現在、ロボットコンポーネントとして生物材料を使用しており、「ネクロボティクス」の分野を開始しています。
なぜクモ?
の共著者 研究 ダニエルプレストン 説明します チームの研究室は、硬質プラスチック、金属、電子機器ではなく、従来とは異なる材料を使用することが多いソフトロボットシステムを専門としています。
「クモはこの調査に分類されます」と彼は言います。 「これまで使用されたことのないものですが、多くの可能性を秘めています。」
彼が指摘したように、死んだクモの体は、小規模で自然に派生したグリッパーに最適なアーキテクチャです。
反対側の筋肉を同期させて手足を動かす人や他の哺乳類とは異なり、クモは油圧を使用します。
彼らは、足をカールさせる屈筋だけを持っており、油圧で外側に伸ばします。 スパイダーの油圧チャンバーの内部バルブにより、スパイダーは各脚を個別に制御することもできます。
彼らが死ぬとき、彼らは彼らの体を積極的に加圧する能力を失います。 それが彼らが丸くなる理由です。
研究者たちは、このメカニズムを活用する方法を見つけました。
エンジニアはどのようにしてクモをロボットに変えましたか?
スパイダーグリッパーのセットアップには、単一のかなり単純な製造ステップが必要でした。
科学者たちは針でクモの油圧チャンバーを軽くたたき、グリッパーを瞬間接着剤で取り付けました。 彼らは、針のもう一方の端をラボのテストリグの1つまたはハンドヘルドシリンジに接続しました。 これにより少量の空気が供給され、ほぼ瞬時に脚が作動しました。
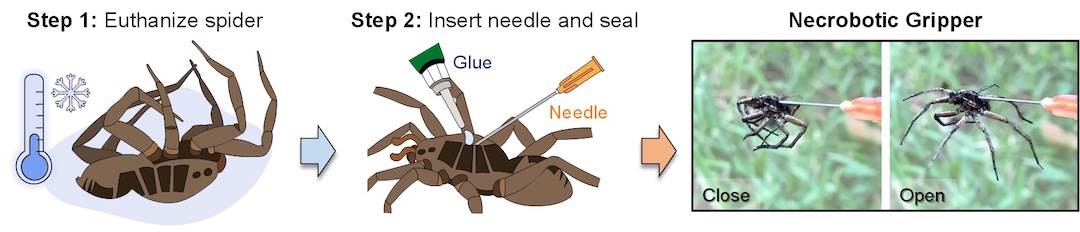
これにより、彼らはすべてのクモの足を同時に制御することができました。
下のビデオでは、プレストンがネクロボットスパイダーがどのように機能するかを示しています。 気をつけてください、あなたがクモを恐れているなら、それはおそらくあなたを這うでしょう。
奇妙な実験から有用な技術まで
使用したチーム オオカミのクモ そしてテストは彼らが彼ら自身の体重の130%以上を持ち上げることができたことを示しました。 彼らはグリッパーに回路基板を操作させ、物体を動かし、さらに別のクモを持ち上げさせました。
彼らはまた、ネクロボットが、摩耗の兆候を示し始める前に、1,000回近くの開閉サイクルに耐えることができることを発見しました。
しかし、実際のアプリケーションで何を得るのでしょうか。
「調査できるピックアンドプレースタスクはたくさんあります。これらの小規模なオブジェクトの並べ替えや移動などの反復的なタスク、さらにはマイクロエレクトロニクスの組み立てなどもあります」とプレストン氏は言います。
別のアプリケーションは、ネクロボットを使用して、本質的にカモフラージュされているため、自然界の小さな昆虫を捕獲することです。
次に、持続可能性があります。 クモ自体は生分解性です」とプレストン氏は述べています。 「したがって、従来のコンポーネントでは問題となる可能性のある大きな廃棄物の流れを導入していません。」
ネクロボットはゾンビのクモが生き返ったように見えます—そして私は確かに私の近くに物を持ち上げたくないでしょう。 それにもかかわらず、生物学とロボット工学の融合が現代のテクノロジーをどのように変えているかは畏敬の念を起こさせます。
あなたは完全な研究を見つけることができます ここ。
The post 科学者は死んだクモを小さな物体をつかむことができるロボットに変えます appeared first on Gamingsym Japan.